첨단 운전자 지원 시스템 (ADAS: Advanced Driver Assistance System)에서 완전한 레벨 5 자율 주행에 이르기까지 인공 지능, 머신 러닝, 센서에 특별히 중점을 둔 컴퓨팅 유닛은 스로틀 입력 값을 토크 요구 값으로 변환, 안전 시스템 모니터링, 제어 루프 및 동력 제한 등과 같은 자율 주행 차량의 주요 제어 기능을 처리한다. 따라서 자율 주행 차량 (AV)은 미래의 모빌리티를 보다 효율적이고 안전하며 깨끗하게 만드는 데 기여할 수 있다.

- 자율 주행 차량의 작동 방식
-
센서는 차량을 무인화하는 핵심 요소이다. 카메라, 레이더, 초음파 및 라이다(LiDAR)를 통해 자율 주행 차량은 주변을 시각화하고 물체를 감지할 수 있다. 오늘날 자동차에는 다양한 작업을 수행하는 점점 더 많은 환경 센서가 장착되어 있다. 시청각용 제어 시스템 통합 센서는 인식, 결정 및 실행의 세 부분으로 구성된다.
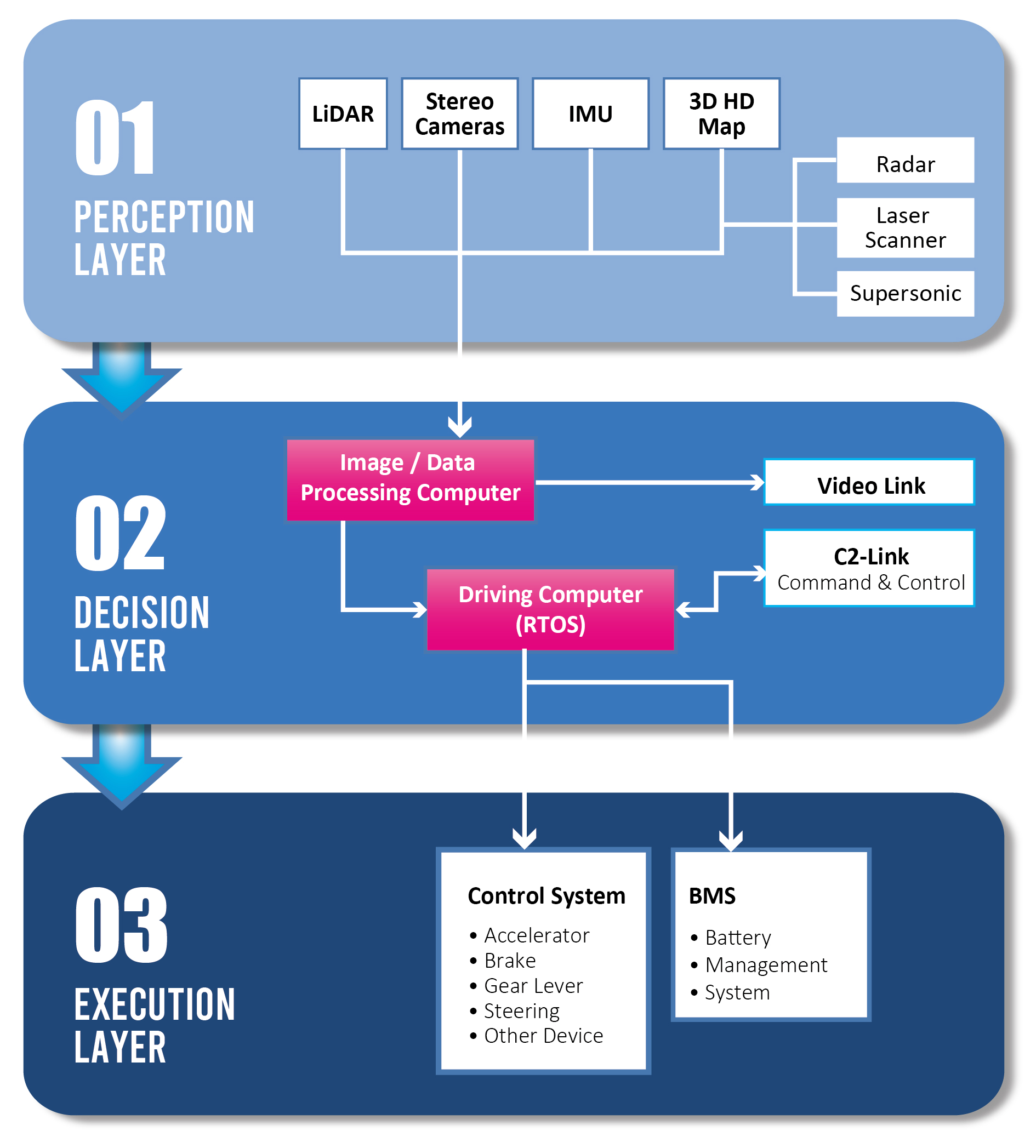
01. 인식 레이어
인식을 통해 센서는 물체를 감지 할뿐만 아니라 주변 물체를 학습하고 궁극적으로 분류하고 추적할 수 있다. 센서 인식 작업은 위치 파악, 감지 및 추적의 세 부분으로 구성된다. 이 모든 것들은 서로 다른 수준에서 수행되는 데이터 융합을 통해 이루어졌다. 예를 들어 위치 파악은 일반적으로 GPS, IMU 및 LiDAR의 데이터를 통합하는 알고리즘에 의해 수행되어 고해상도 그룹 맵이 생성된다. 시각 기반 딥 러닝 기술은 방대한 양의 데이터를 자율적으로 처리할 수 있기 때문에 물체 감지에 대한 정확한 결과를 얻는다.
02. 결정 레이어
의사 결정은 AV가 수행해야하는 가장 어려운 작업 중 하나이다. 여기에는 예측, 경로 계획 및 장애물 회피가 포함된다. 그 모든 것들은 이전의 인식을 기반으로 수행된다. 통합 센서 시스템의 가장 중요한 부분인 의사 결정은 중요한 임무를 완수하기 위해 최소 두 대의 컴퓨터가 필요하다. 컴퓨터 중 하나(영상 처리 컴퓨터)는 센서에서 전달되는 방대한 양의 데이터를 처리한 다음 분류된 데이터를 다른 컴퓨터(드라이빙 컴퓨터)로 전송한다. 분석된 데이터의 도움으로 드라이빙 컴퓨터는 가속기 및 브레이크와 같은 장치에 명령하여 속도를 조정할 수 있다.
03. 실행 레이어
실행 레이어는 가속기, 브레이크, 기어박스 등의 상호 연결로 구성된다. 실시간 운영 체제(RTOS)에 의해 구동되는 이러한 모든 장치는 드라이빙 컴퓨터에서 지시한 명령을 수행하여 인공 지능이 설정한 작업을 수행할 수 있다. 따라서 AV는 조향, 변속, 가속 및 제동이라는 차량 작동의 "사주 (four pillars)"라고 알려진 필요한 모든 기계적 동작을 실행할 수 있다.
- 고성능 컴퓨팅 능력의 요구
-
7StarLake GPGPU 시리즈
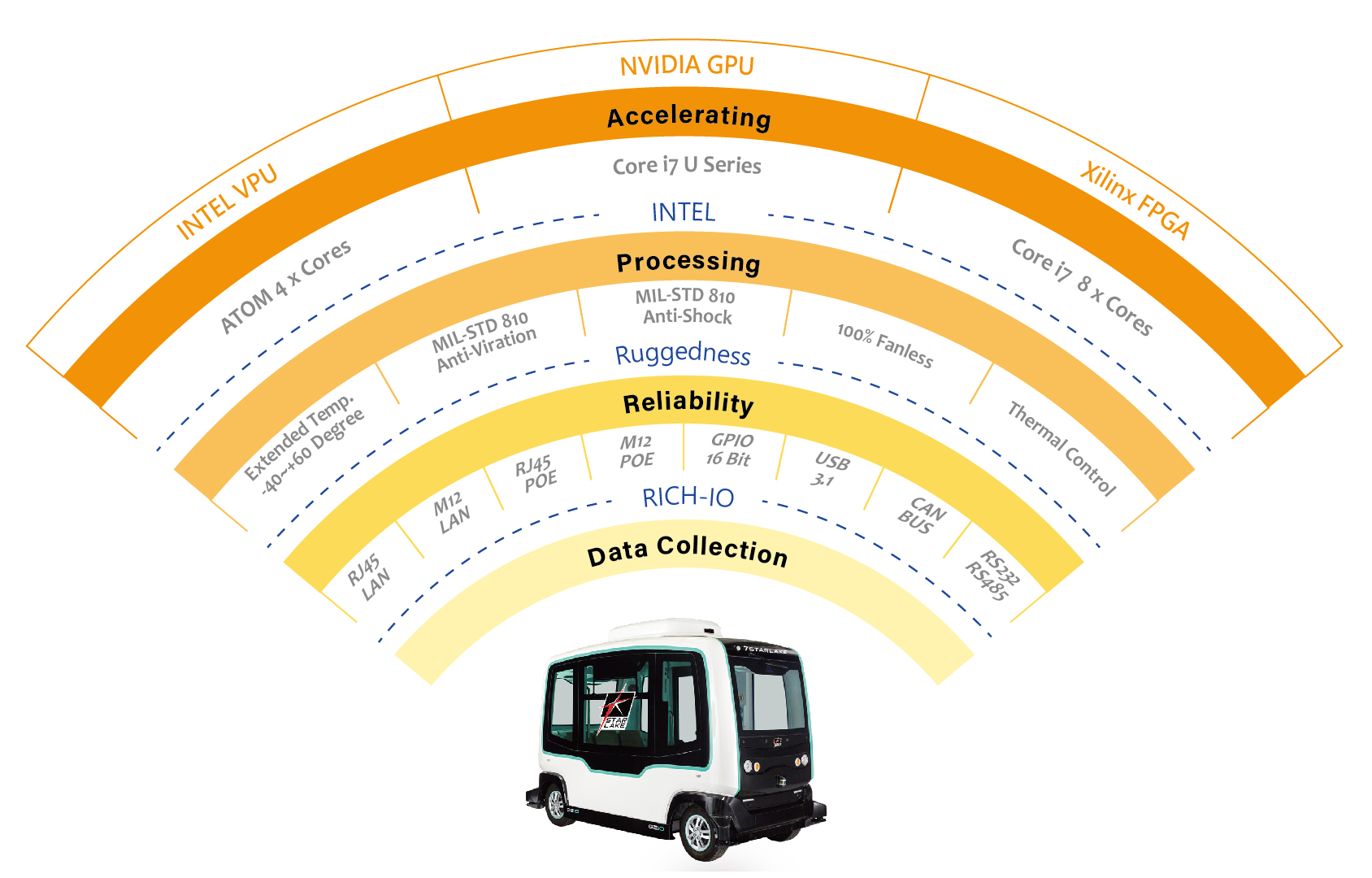
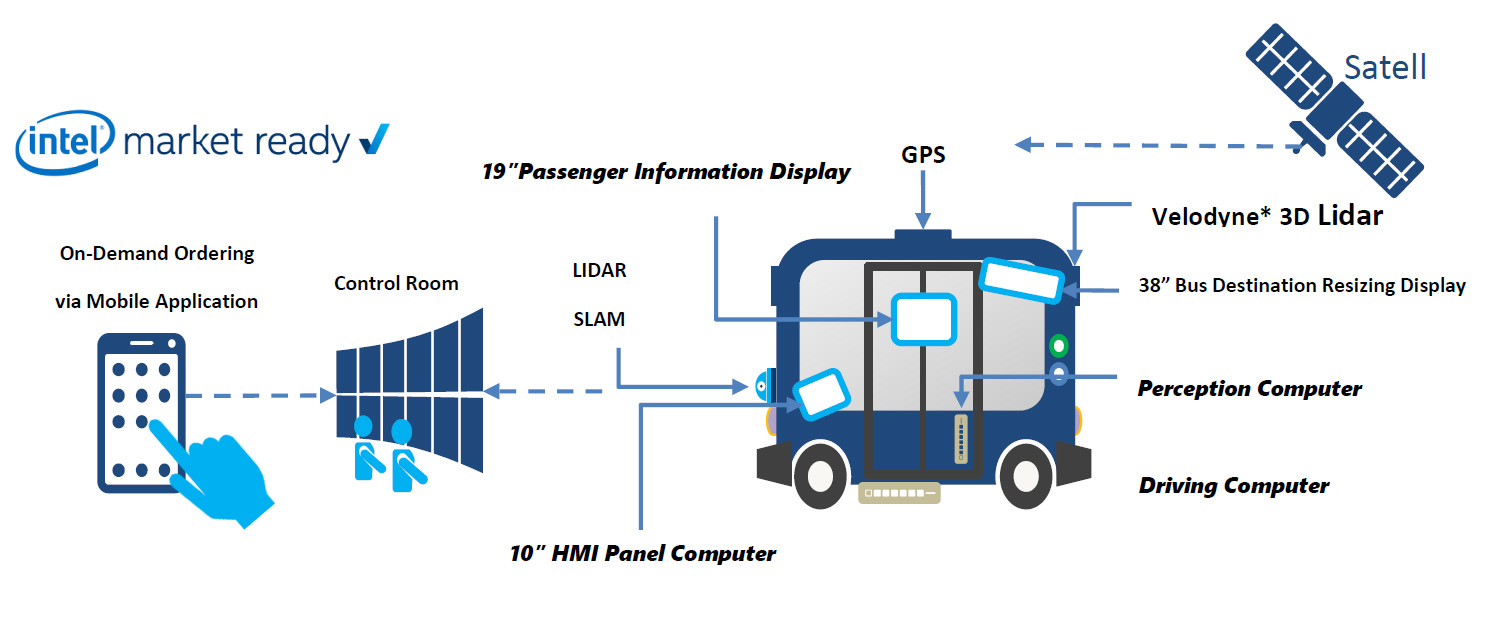
자율 주행 제어 장치는 자율 주행 차량의 핵심 제어 장치이다. 7Starlake는 고성능 GPGPU 컴퓨터를 EASYMILE로 설계하여 최첨단 무인 셔틀 EZ10을 구현했다. EZ10은 2015년에 출시되었으며 아시아, 중동, 북미 및 유럽을 포함한 26개국에서 최대 200개 사이트를 운영되고 있다. EZ10에는 조향 핸들, 가스 페달 또는 브레이크 페달이 없으며 100 % 무인 장치이다. 일반 자동차에 비해 GPU, CPU 및 FPGA와 같은 하드웨어 가속기는 계산 집약적 작업을 처리하는 자율 주행 차량에 매우 중요하다.

전 세계적으로 자율 주행차 사용이 기하 급수적으로 증가함에 따라 7StarLake는 자율 주행차에 적합한 제품을 지속적으로 개발하고 있다. 7StarLake의 GPGPU AI Fusion 컴퓨터는 예측할 수 없는 다양한 조건에 대한 탁월한 내구성과 다중 사용을 위한 완벽한 적응으로 이미지 처리 및 주행을 위한 완벽한 구조를 제공한다. 다양한 비전 센서 데이터를 동기식으로 처리할 수 있으며 모든 관련 센서 인터페이스, 버스 및 네트워크를 지원하는 자율 주행을 위한 고성능 솔루션을 제공한다.
환경 조건 및 용도에 따라 AV는 다른 시설 요소 및 시스템 구성이 필요하다. 최근의 혁신 및 검토 과정에서 AV는 화물 리프터, 셔틀 버스, 전투용 MUTT (군사용 유틸리티 전술 트럭)의 세 가지 주요 분야에서 일반적으로 사용된다. 작업에 대한 자세한 내용은 아래의 하이라이트 솔루션을 확인 바람.