- Introduction
-
Unmanned Surface Vehicles (USVs) are rapidly evolving from remotely operated platforms into fully autonomous, multi-sensor, AI-enabled naval assets. Modern USVs are expected to ingest and process massive volumes of real-time sensor data, execute COLREGS-compliant autonomous navigation, operate reliably in contested and degraded electromagnetic environments, and seamlessly coordinate with unmanned air, ground, and maritime systems as part of joint and coalition operations.
This expanding mission profile places unprecedented demands on onboard compute, networking, and system resilience. Legacy embedded computing architectures are no longer sufficient. Instead, a new generation of military-grade edge AI supercomputers and ruggedized, deterministic networking infrastructure is required to support sensor fusion, perception, autonomy, and real-time decision-making at the tactical edge—without reliance on continuous reach-back connectivity.
7StarLake’s Modern USV Fleet Computing Solution, including the AV800 Xeon-D GPU Server, THOR200-PE8D rugged Ethernet switch, and the IV320 Edge Servers —an integrated compute-and-networking foundation. It enables scalable autonomy, robust sensor integration, and secure, real-time coordination, serving as a critical enabler for next-generation unmanned maritime operations.

- The Operational Shift: From Remote Tools To Autonomous Teammates
-
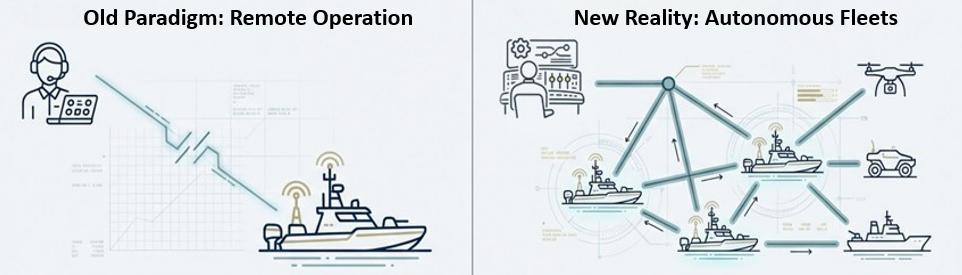
Unmanned Surface Vehicles are evolving from remotely operated craft into fully autonomous, multi-sensor, Al-enabled naval assets. This transformation demands a new generation of onboard intelligence and fleet-level coordination.
Previously, USVs relied on constant man-in-the-loop control, making them highly vulnerable to communication link disruptions and restricting their use to isolated, single-asset missions. Today, advances in autonomy and command-and-control architectures enable USVs to execute complex missions without continuous supervisory control.
The Command-Ship Centric Fleet: Centralized Strategy, Distributed Execution
Command Ship/ Control Center
- Handles mission orchestration and dynamic tasking.
- Executes fleet-level autonomy (swarm, COLREGS monitoring).
- Provides Al-assisted decision support.
Autonomous USV Fleet
- Performs independent navigation and obstacle avoidance.
- Processes sensor data at the edge to reduce latency.
- Maintains functionality during communication degradation.
This architecture combines strategic oversight with tactical autonomy: the command ship retains fleet-level control while delegating real-time decision-making to individual USVs, resulting in a resilient and scalable force multiplier.
How Autonomy and Autonomous Solutions Are Implemented in USVs
USV autonomy is not a single algorithm but a deeply integrated, layered system that replicates the functions of a human crew: sensing the environment, understanding position, and making intelligent decisions. It is a layered architecture, combining perception, positioning, compute, path planning, and communication. Each layer presents unique data processing and networking challenges that must be solved at the edge.
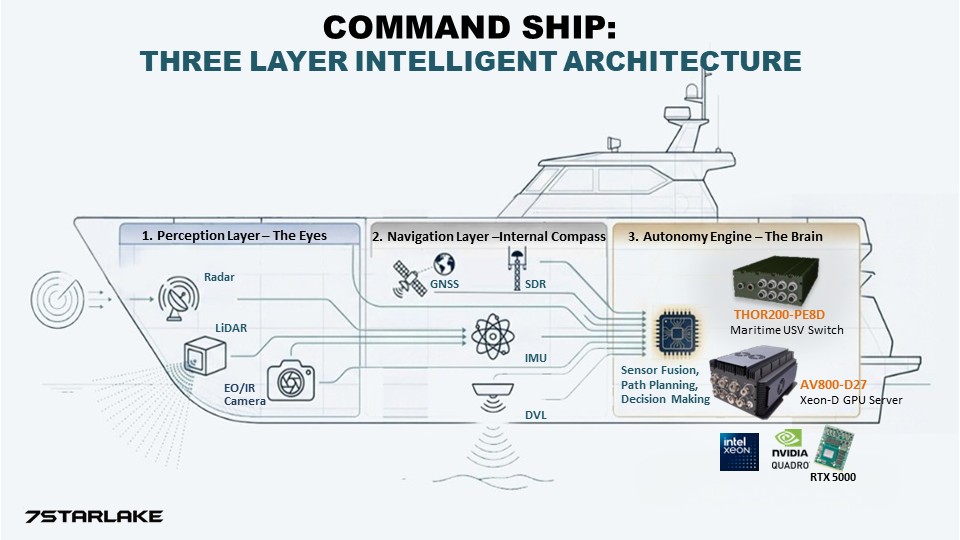
Layer 1: Perception Layer – the Eye
Sensor
Role
Strengths
Limitations
LiDAR
(3D/solid-state)
3D mapping, obstacle avoidance, port navigation
Accurate distances, works in darkness
Rain/fog attenuation, <200 m typical
Marine Radar
(X-band/Doppler)
Long-range situational awareness
Works in all weather, >5 km detection
Limited resolution for small debris
4D Imaging Radar
(Automotive-grade)
Small-object detection & micro-Doppler
Good on small drones/boats
Shorter range
EO Camera
Daytime detection, color classification
High detail
Glare, fog
IR Thermal Camera
Night detection, human/boat heat signatures
Works in darkness
Salt spray on lens
AIS Receiver
Vessel ID & collision updates
Provides other vessel metadata
Only works if others broadcast
This perception data feeds into the USV’s autonomy engine for fusion and classification.
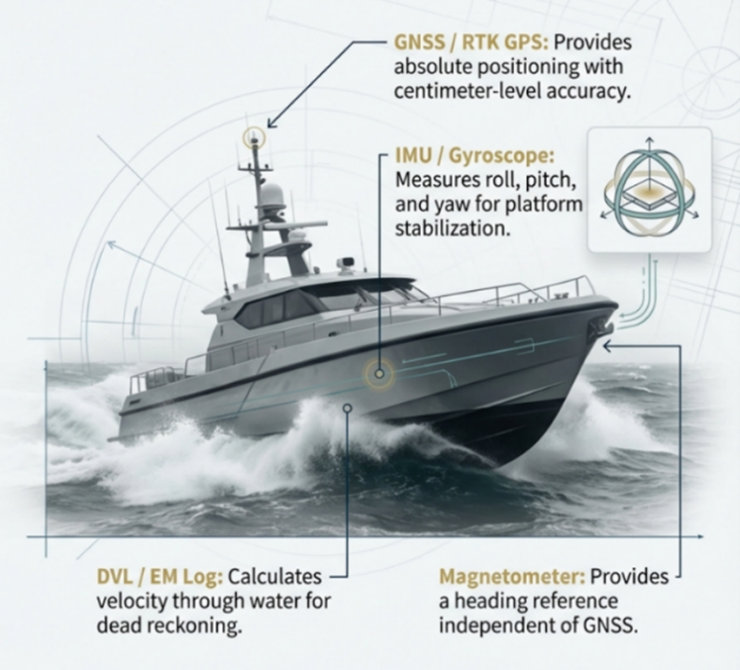
Layer 2 Navigation Layer — “The Internal Compass”A precise and resilient navigation suite is fundamental to reliable USV operation across demanding maritime conditions. By tightly integrating GNSS, inertial navigation systems (INS), motion reference units (MRU), and onboard estimation algorithms, the navigation stack maintains accurate position, velocity, and attitude in heavy seas and during aggressive, high-speed maneuvers. When GNSS signals are degraded, denied, or unavailable, the system seamlessly transitions to dead reckoning and inertial-based navigation, preserving continuity of control and situational awareness. This robustness ensures platform stability, precise trajectory tracking, and dependable navigation performance across the full operational envelope.
- GNSS / RTK GPS for absolute positioning (±1–3 cm with RTK)
- IMU / Gyroscope for roll/pitch/yaw stabilization
- DVL / EM Log for dead reckoning when GNSS is lost
- Magnetometer for heading reference
- Wave-compensated attitude estimation for gimballed EO/IR sensors
Layer 3 Autonomy Engine — The “Brain” of the USV
The Autonomy Engine serves as the central intelligence of the USV. It integrates perception, decision-making, and control functions to enable safe, efficient, and compliant autonomous operations. The Autonomy Engine comprises four essential components:
- Sensor Fusion
Integrates data from multiple onboard sensors to generate a coherent and accurate situational picture of the operating environment.
- AI-Based Object Detection and Situational Awareness
Employs artificial intelligence to detect, classify, and track objects, enabling real-time understanding of surrounding vessels, obstacles, and environmental conditions.
- COLREGs-Compliant Path Planning
Plans and continuously updates safe navigation paths in full compliance with the International Regulations for Preventing Collisions at Sea.
- Autonomous Control
Executes planned maneuvers through closed-loop control of propulsion and steering systems, ensuring stable, responsive, and reliable vessel behavior.

- Integrated IT Architecture of a Modern Intelligent USV Fleet Solution
-
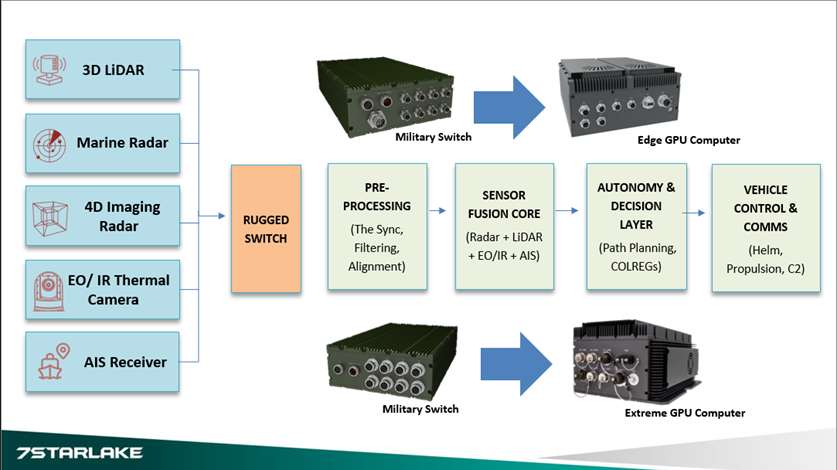
Integrated IT Architecture of a Modern Intelligent USV Fleet Solution is designed to deliver robust autonomy, real-time situational awareness, and reliable fleet coordination in complex maritime environments. At the core of each USV is a tightly integrated onboard IT architecture that unifies multi-modal sensors, high-performance edge computing, and resilient networking. This layered approach ensures that data from LiDAR, radar, EO/IR cameras, AIS, and navigation sensors is efficiently acquired, fused, and processed to support safe navigation, threat detection, and mission execution under both autonomous and supervised modes of operation.
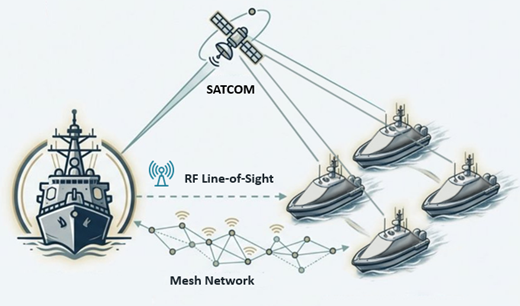
Within this architecture, the AV800-D27 AI server functions as the primary compute node, executing advanced sensor fusion, AI inference, navigation planning, and decision-making with low latency. The THOR200-PE8D switch provides high-availability networking, traffic segmentation, and quality-of-service control to guarantee deterministic performance for mission-critical data streams. Multiple communication links — including mesh radio, LTE/5G, SATCOM, and AIS —enable seamless connectivity for multi-USV coordination, beyond-line-of-sight control, and maritime domain awareness, forming a scalable and resilient foundation for modern intelligent USV fleet operations.
Onboard USV IT Architecture
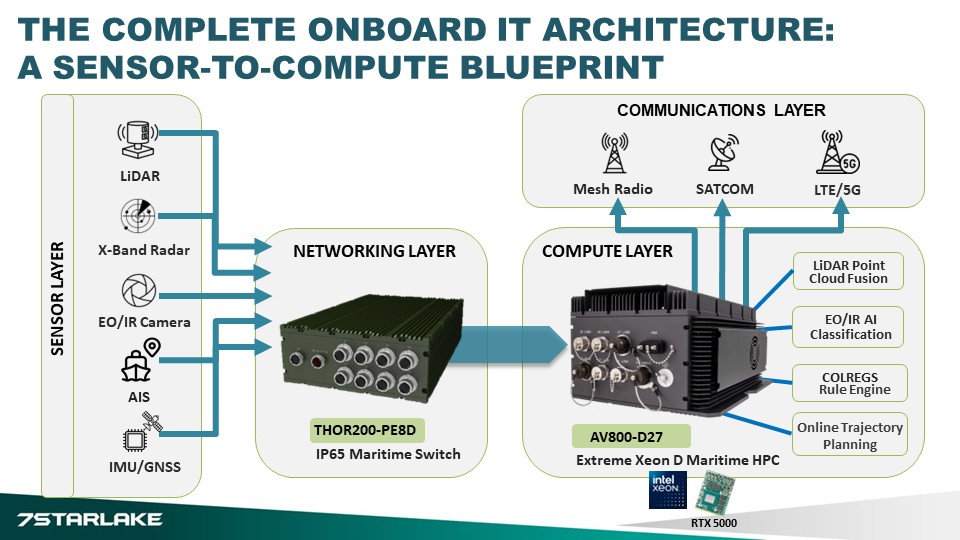
A. Sensor Layer
- LiDAR → THOR200-PE8D Switch → AV800-D27 AI Server
- Marine Radar → Radar Processor → AV800-D27
- EO/IR PTZ Camera → THOR200-PE8D → AV800-D27 (GPU inference pipeline)
- AIS Receiver → THOR200-PE8D → Autonomy Engine IMU / GNSS / DVL → AV800-D27 (navigation fusion)
- SDR Mesh → C2 Link → Fleet Control
B. Compute Layer
AV800-D27 performs:
- Radar digital signal processing
- EO/IR AI classification COLREGS rule engine
- Online trajectory planning Threat detection & classification
- Low-latency decision making
- LiDAR point cloud fusion

C. Networking Layer
THOR200-PE8D provides:
- High-availability Ethernet switching
- VLAN segmentation (sensor vs comms)
- QoS prioritization for EO/IR streams
- Redundant link to SATCOM and mesh radios

D. Communications Layer
- Mesh radio → multi-USV coordination
- LTE/5G → coastal operation
- SATCOM → BLOS (beyond line-of-sight) control
- AIS → maritime domain awareness
- Fleet-Level Architecture (Command Ship + Multiple USVs) - From A Single Node To A Distributed AI Mesh
-
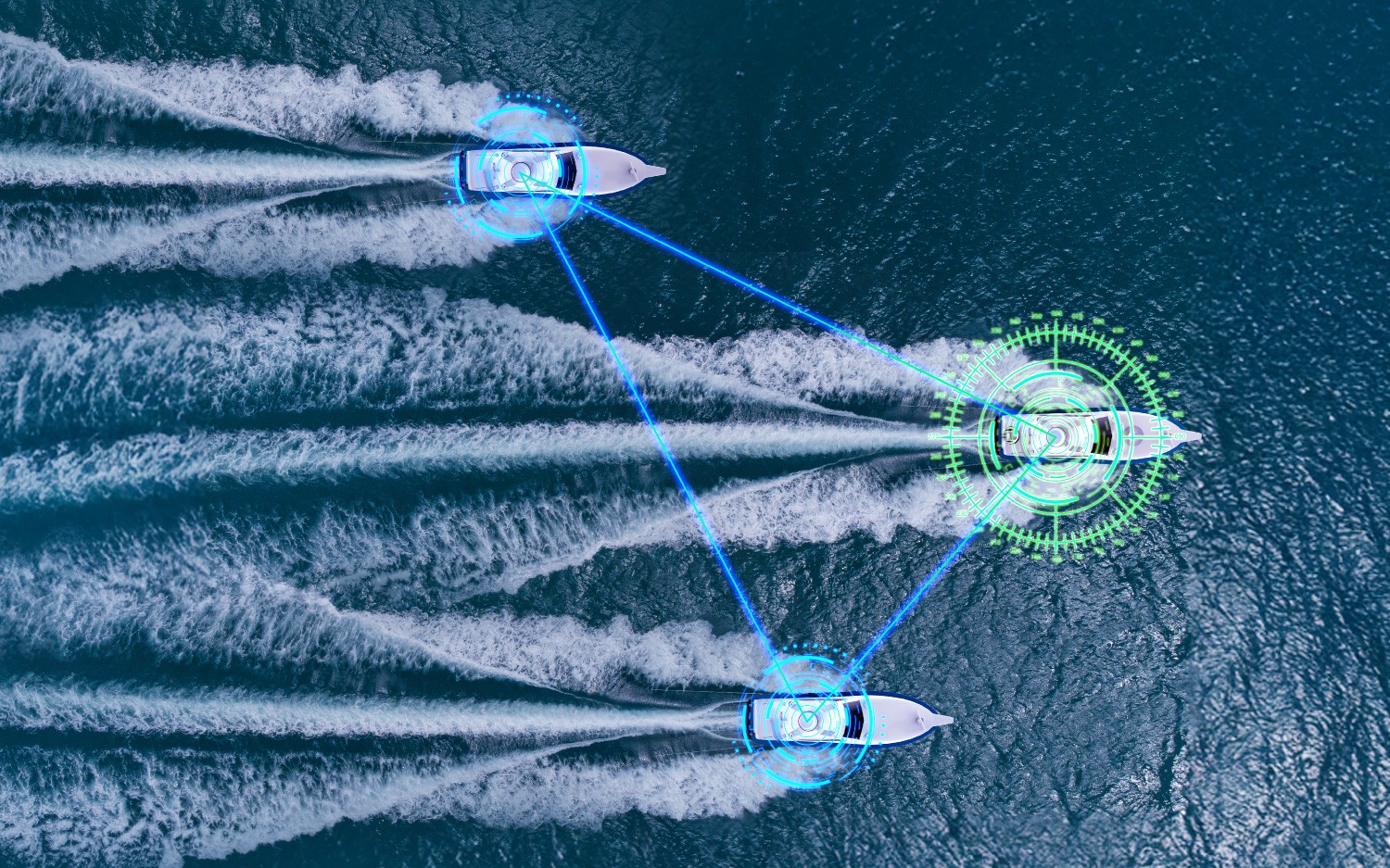
Fleet-Level Architecture transforms each onboard high-performance computer into a node in a distributed network, enabling coordinated, intelligent, and resilient USV operations. Rather than operating independently, USVs continuously share data and intelligence across the fleet, forming a collaborative AI mesh. A command ship or command center runs fleet-level command and control (C2), fusing data from all USVs and issuing mission tasks such as reconnaissance, target tracking, perimeter patrol, and swarm operations. Within the fleet, USVs exchange target cues, local maps, threat alerts, and navigation safety data in real time.
Powered by the AV800-D27 on the command ship and the IV320-RS-F on each USV, this architecture enables collaborative mapping, shared situational awareness, and multi-agent decision-making, ensuring robust performance even in contested or communication-degraded environments.

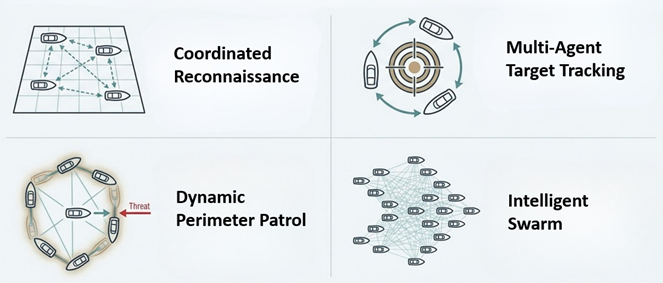
UNLOCKING ADVANCED FLEET-LEVEL MISSIONS
A fleet built on a sensor-centric, distributed architecture enables a new class of maritime operations that extend far beyond the capabilities of single platforms or traditional remotely operated vehicles. By allowing multiple USVs to share sensor data, situational awareness, and decision intelligence in real time, the fleet can act as a coordinated system rather than isolated assets. This architecture supports complex, collaborative missions such as coordinated reconnaissance, multi-agent target tracking, dynamic perimeter patrol, and intelligent swarm operations, delivering greater coverage, resilience, and operational effectiveness in contested and dynamic maritime environments.
- AV800 Series — AI Supercomputers for USV Autonomy Command Ships
-
The AV800-D27 and AV800-H32 are military-grade, IP65, Xeon-D GPU server built for edge AI in multi-domain autonomous systems:
- Ice Lake Xeon-D (20 cores), Granite Raids SoC (32 cores) optimized for edge workloads
- NVIDIA A4500 / 5000 Ada MXM GPU (AI perception, Radar Processing, LiDAR Fusion)
- IP65 ruggedization + MIL-STD-461/810/1275 certified
- High-speed I/O (2×100G) for sensor ingestion
- Removable NVMe storage for mission logs
- Secure AES hardware erase for data protection (optional)
- Wide input 18–36 V suitable for maritime power systems
Key Capabilities of AI Supercomputer for USVs
- Sensor fusion
- Real-time object detection
- Multi-sensor autonomy algorithms
- Situational awareness map generation
- Maritime target tracking & threat analysis

- IV320-RS-F — Tactical Edge Computer for USVs
-
IV320-RS-F is an optimized IP66 Rugged GPU Computer which enables persistent maritime ISR with autonomous, coordinated USVs:
- Intel® 14th Gen Raptor Lake-R/S, Core i9/i7 CPU optimized for edge workloads
- NVIDIA® RTX 4000 SFF Ada (AI perception, Radar Processing, LiDAR Fusion)
- IP66 ruggedization + MIL-STD-810 standards
- 2 x LAN (2.5GbE) for sensor ingestion
- Rugged M20/M12 connectors
- Wide input 18–36V suitable for maritime power systems
Key Capabilities of Edge Computers for USVs
- Sensor fusion
- Real-time object detection
- Multi-sensor autonomy algorithms
- Situational awareness map generation
- Maritime target tracking & threat analysis

- THOR200-PE8D — The Mission Network Backbone
-
A USV is a sensor-dense platform, typically with:
- 10+ IP/ethernet sensors
- 1–2 Radar feeds
- EO/IR continuous video streams
- Multiple Radios (SDR, LTE, SATCOM)
THOR200-PE8D military maritime switch provides:
- 8× rugged PoE/PoE+ ports
- MIL-DTL-38999 connectors
- Low latency Layer 2 switching
- Deterministic timing for real-time autonomy
- Redundant ring networking for fleet operation
The THOR200-PE8D military switch ensures that every sensor reaches the GPU Computers without packet loss, even under vibration, EMI, or heavy bandwidth demand.

- Conclusion
-
A next-generation USV requires:
-
High-performance, rugged AI compute (AV800-D27)
-
Deterministic mission networking (THOR200-PE8D)
-
Comprehensive multi-sensor architecture
-
Robust autonomy engine with COLREGS compliance
-
Multi-layer communications stack

Unmanned surface vessels (USVs) have become a critical capability in modern conflict and electronic intelligence (ELINT) operations due to their ability to operate persistently, discreetly, and at scale in high-risk maritime environments. By removing personnel from the platform, USVs significantly reduce operational risk while enabling access to contested or denied waters where traditional crewed vessels may be vulnerable or politically escalatory. Their smaller signatures, lower cost, and modular payload capacity make them well-suited for intelligence collection, surveillance, reconnaissance, and electronic sensing missions that require long dwell times and proximity to adversary activity.
The evolution of USV operations clearly demonstrates that mission success is no longer driven by platform-centric design, but by the intelligence and robustness of the supporting IT and autonomy infrastructure. As operational environments become more congested, contested, and data-intensive, USV fleets must rely on a comprehensive multi-sensor architecture tightly coupled with a mature autonomy engine capable of real-time sensor fusion, AI-driven decision-making, and deterministic compliance with COLREGS. High-performance, ruggedized edge compute enables these capabilities to operate reliably at sea, while deterministic mission networking ensures predictable, low-latency communication across vessels, payloads, and command elements. Together, these components form a resilient digital backbone that allows autonomy to function consistently under real-world maritime constraints, including limited bandwidth, degraded connectivity, and harsh environmental conditions.
-



