- Introduction
-
Modern warfare demands speed, precision, and reliability—especially in artillery radar and Multiple-Launch Rocket System (MLRS) operations, where decisions must be made in fractions of a second. Traditional operating systems often fall short in these mission-critical environments due to latency and unpredictable performance. RedHawk™ Linux, however, is purpose-built for deterministic real-time computing, delivering ultra-low latency and jitter-free responsiveness that ensure critical data is processed exactly when it’s needed.
Deployed on rugged military servers built on x86 architecture with PCIe expansion, RedHawk™ Linux powers advanced defense applications such as electronic intelligence (ELINT), UAV consoles, artillery radar, and intelligent electronic warfare systems. With precision timing, GPU acceleration, and rock-solid stability, it enables forces to achieve superior situational awareness and faster decision-making under the most demanding battlefield conditions. More than just an operating system, RedHawk™ Linux is a force multiplier—bringing reliability and real-time performance to the tactical edge. Next, we examine how RedHawk™ Linux is applied in Artillery Radar and MLRS, and how 7STARLAKE's rugged computing systems enhance their effectiveness.

- RedHawk™ on x86 Architecture
-
- Maximum CPU/GPU throughput & slots with multi-socket Xeon or AMD processors, large memory capacity, and abundant PCIe slots for high-rate DAQ, timing, NICs, and FPGAs. Designed as rack or tower platforms, they are purpose-built for time-critical simulation, data acquisition (DAQ), and control, and come preloaded with RedHawk™ Linux for deterministic real-time performance.
- Hard real-time performance with classic I/O timing, supporting RCIM timing/interrupt cards and other real-time boards. Support real-time virtualization with KVM-RT, enabling RT VMs with pinned cores, memory, and devices for deterministic performance.
- Deliver minimal jitter at scale with CPU and IRQ shielding, along with tuning guides for optimized real-time performance.

X86 System Configurations
- 1U/2U: for constrained spaces; support fewer PCIe cards; well-suited for controller/HIL (hardware-in-the-loop) host nodes. Recommended 7StarLake Products: THOR11-D27 (1U), THOR22-H6 (2U), HORUS440-H6 (2U), 7SL-R760 (2U).
- 3U/4U: accommodate multiple GPUs/FPGA/DAQ and RCIM timing cards; ample space for high-slot configurations (real-time I/O, multi-NIC); support a wide range of PCIe cards. Recommended 7StarLake Product: HORUS660 (4U).
- Tower/desktop: ideal for benchtop prototypes or classroom lab or development setups. They provide full RedHawk™ Linux real-time capabilities and support RCIM timing/interrupt cards.

- Artillery Radar
-
Artillery radar has become a decisive element in modern battlefields, fundamentally changing how armed forces detect, track, and respond to enemy fire. By providing real-time trajectory tracking and pinpointing the origin of hostile artillery, these systems enable rapid countermeasures that save lives and secure tactical superiority. In an era where milliseconds can decide outcomes, the demand for ultra-reliable, low-latency computing is critical. This is where RedHawk™ Linux and ruggedized edge servers play a vital role. With deterministic real-time performance, GPU acceleration, and hardened designs built to endure extreme conditions, they ensure that artillery radar systems can process vast amounts of data instantly and without interruption. The result is faster threat detection, greater situational awareness, and enhanced operational effectiveness, giving modern forces the ability to outmaneuver adversaries and maintain battlefield dominance.
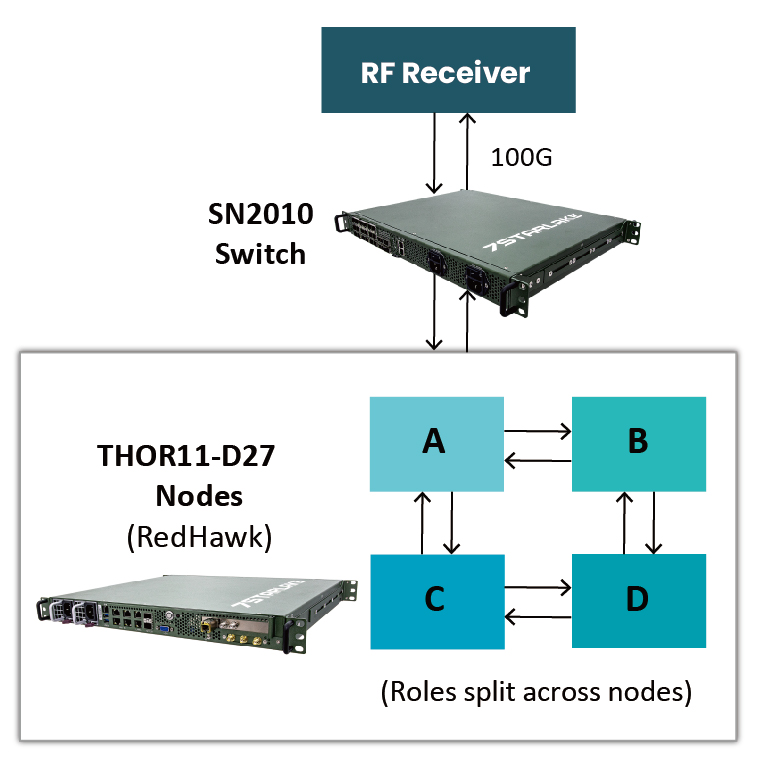
System Topology
The architecture consists of 4× THOR11-D27 nodes connected to an SN2010-AA-HSC 100 GbE switch, which in turn interfaces with external RF receivers. The switch provides 4× 40/100 GbE and 18× 10/25 GbE ports, delivering an aggregate fabric capacity of ~1.7 Tb/s. Each THOR node connects via 4× 100 GbE (QSFP28) links into the switch.
How it Works
1. Receivers → Switch: RF receivers stream IQ/PDW over 100 GbE (UDP or RDMA/RoCE depending on your front-end), optionally with PTP hardware timestamps.
2. Switching & time: The NVIDIA/Mellanox Spectrum SN2010 can run PTP (Onyx/Cumulus) as transparent/boundary clock to keep all four THORs phase-aligned to a grandmaster or GPS/IRIG gateway.
3. THOR11-D27 nodes (RedHawk™):
Node roles:
- (a) ingest & record
- (b) detection (pulse compression/CFAR)
- (c) tracking/fusion
- (d) HMI/QA
Threads: NIC RX pollers + ISR handlers (SCHED_FIFO), GPU workers (if present), writers (NVMe), and health/HMI on non-RT cores.
4. Distribution: If a node gets saturated, rebalance streams via the switch (ECMP/multicast).
Why RedHawk™ Matters Here
- Bounded jitter under load: RT kernel + CPU/IRQ shielding keep RX pollers and ISR paths on isolated cores; great for 100 GbE bursts.
- NightStar helps find priority inversions/affinity mistakes fast.
- Deterministic scheduling & tracing: You can tune policies, pin interrupts, and verify latency budgets with NightTrace/NightTune. (Optional)
Minimal Timing Plan
Run linuxptp on all THOR nodes. Configure the SN2010 switch as a boundary or transparent clock, and synchronize receivers if they support PTP. If a GPS/IRIG gateway is added later, the switch will cleanly distribute time across all four hosts. 4 hosts
- RT VMs: If you must segregate functions, KVM-RT keeps guest deadlines tight (sub-10 µs worst-case on certified HW). Most DSP stays native, though.
- Multiple-Launch Rocket System (MLRS)
-
Modern battlefields are no longer defined solely by range and payload, but by the ability to survive and act effectively in a contested electromagnetic environment. For the Multiple-Launch Rocket System (MLRS), this means evolving from a mass-fire artillery system into a precision, networked, and spectrum-resilient strike platform. The demands are clear: launchers must communicate securely even under jamming, integrate real-time targeting data from UAVs and satellites, and adjust trajectories mid-flight when GPS signals are denied. These requirements point directly to advanced radio-frequency applications.

Phased-array and Massive MIMO antennas allow MLRS units to maintain directional, high-capacity links while also functioning as distributed sensors. Adaptive RF processing enables resilient command and control, rapid fire-control loops, and cooperative targeting across dispersed launchers. By embedding these RF-driven capabilities, MLRS transitions from a reactive fire support asset into an intelligent battlefield node—capable of delivering precision effects while contributing to electromagnetic dominance and joint operations.
How It Works
Node A (front-end & fan-out):
RF chains hit the 3× RFSoC boards → on-FPGA DDC/filters/channelization/PDW pre-extract → PCIe DMA into Node-A RAM. RedHawk™ user-space pollers format & push subsets (streams or PDWs) over the Dolphin PCIe NTB to Nodes B/C using eXpressWare (RDMA/DMA).Node B (mid-band DSP):
Range-Doppler/CFAR/association; sends tracks/feature tensors to Node C via NTB.Node C (GPU exploitation):
RTX 5000 Ada runs deep nets for emitter ID/behavior; results loop back to B/A for fusion/record.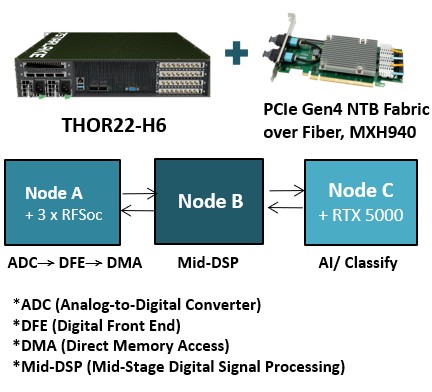
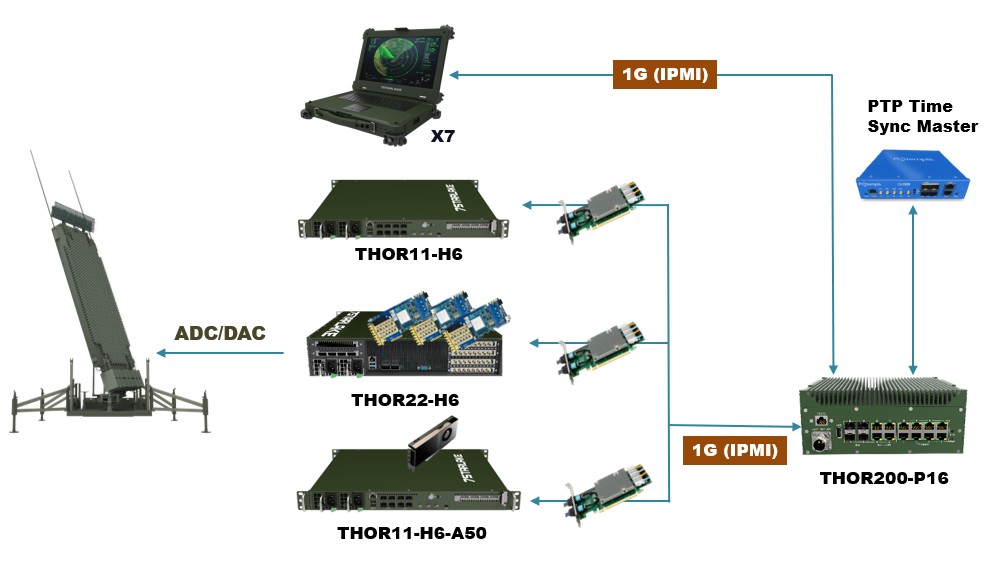
Timing & Coherency
The PCIe fabric itself doesn’t distribute a house time; use PTP (1588) on a management NIC or a hardware timing source (IRIG-B/PPS via a timing card) so PDWs from A/B/C share a common epoch. Concurrent’s RCIM IV adds a synchronized 64-bit clock and distributed interrupts if you want hard start/trigger across hosts.
Why RedHawk™ Matters Here
- DMA determinism: Shielded cores for DMA pollers and ISR handling keep PCIe latencies bounded when three RFSoCs are pushing at once.
- NightTrace shows end-to-end gaps (ISR→poller→GPU).
- Multi-node orchestration: With SCHED_FIFO loops on each box and (optionally) distributed interrupts from RCIM IV, you can coordinate deterministic “arm/capture” or replay across all nodes.
Multiple Launch Rocket System over PCIe Fabric
- Conclusion
-
The integration of RedHawk™ Linux with ruggedized servers on X86 and PCIe fabric architectures is reshaping the operational capabilities of artillery radar and Multiple-Launch Rocket Systems (MLRS). Traditional fire-control and targeting systems often rely on centralized computing resources, which can introduce latency and limit scalability. By contrast, real-time Linux combined with distributed PCIe fabrics enables deterministic, ultra-low-latency performance across multiple compute nodes. This architecture allows radar data, sensor inputs, and targeting algorithms to be processed in parallel, ensuring that tracking, guidance, and fire-control decisions are executed with speed and precision, even in complex and dynamic battlefield environments. The result is a system that can adapt in real time, improving both responsiveness and accuracy during high-stakes operations.
Looking ahead, 7StarLake is committed to advancing this vision—delivering compact, mission-ready edge systems that combine GPU acceleration, modular PCIe fabrics, and military-grade ruggedization. This foundation not only strengthens today’s artillery and rocket systems, but also paves the way for future applications in intelligent warfare, electronic defense, and autonomous battlefield operations.



